Velocimetrie obrazu částic (PIV)
Velocimetrie obrazu částic (PIV) je neinvazivní laserová optická měřicí technika pro výzkum a diagnostiku proudění, turbulence, mikrofluidiky, rozprašování a spalovacích procesů.
Společnost Dantec Dynamics nabízí řadu řešení PIV, která vyhovují různým výzkumným potřebám. Základní systémy využívají jednu kameru k měření dvou složek rychlosti v rovině. Pokročilejší systémy využívají více kamer k měření tří složek rychlosti v rovině nebo v objemu.
Ke studiu vírů jsou k dispozici vysokorychlostní systémy. Navíc pokročilé funkce, jako je odhad nejistoty a šíření, které vypovídají o kvalitě měření, pokročilé postprocessingové směrování pro detekci vírů, kombinované měření PIV / LIF / Shadow a výpočty tlaku, pomáhají vytěžit z dat maximum.
Vlastnosti a výhody
Nenarušuje tok
Výsledky lze porovnat s tím, co je vidět na obrázcích.
Současně zkoumá celou oblast
Všestranná technika na míru vašim potřebám
Principy měření PIV
Úvod
Velocimetrie obrazu částic (PIV) je technika měření celého proudového pole, která umožňuje okamžité měření vektorů rychlosti v průřezu proudění. Měří se dvě složky rychlosti, ale použití stereoskopického přístupu umožňuje zaznamenat všechny tři složky rychlosti, což vede k okamžitým 3D vektorům rychlosti pro celou oblast. Výsledkem použití moderních digitálních kamer a specializovaného výpočetního hardwaru jsou mapy rychlostí v reálném čase.

Funkce
- Tato technika je neinvazivní a měří rychlosti částic o velikosti mikronů sledujících proudění.
- Rozsah rychlostí je od nulových po nadzvukové.
- Okamžité mapy vektorů rychlosti v průřezu proudění.
- Všechny tři složky lze získat pomocí stereoskopického uspořádání.
- Díky sekvencím map vektorů rychlosti jsou k dispozici statistiky, prostorové korelace a další relevantní údaje.
Výsledky se podobají výsledkům výpočetní dynamiky tekutin, tj. simulacím velkých vírů, a mapy rychlostí v reálném čase jsou neocenitelným nástrojem pro výzkumníky v oblasti dynamiky tekutin.
Principy
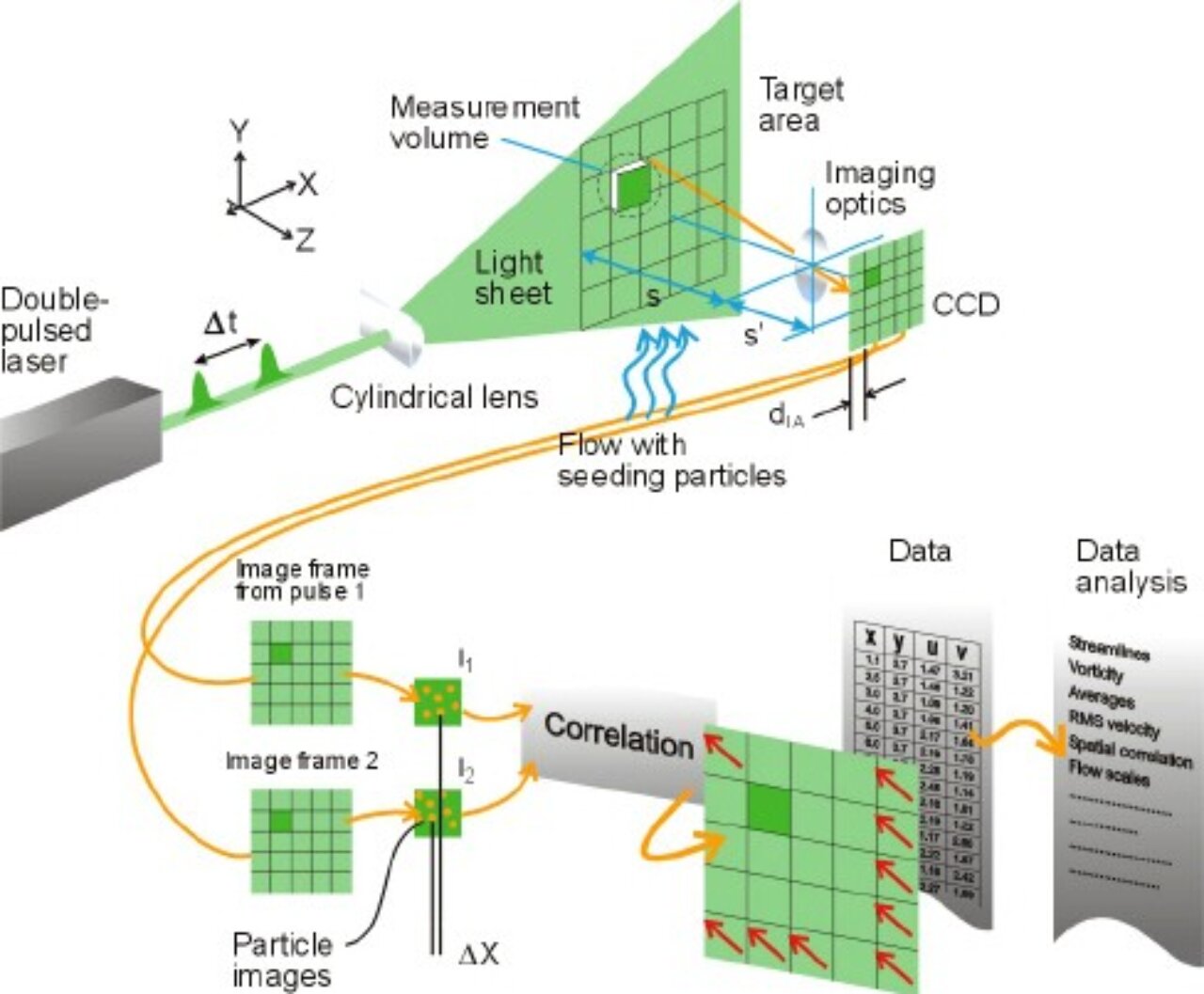
Při PIV se vektory rychlosti odvozují z dílčích úseků cílové oblasti proudění osázeného částicemi měřením pohybu částic mezi dvěma světelnými impulsy:![]()
Proudění je v cílové oblasti osvětleno světelným paprskem. Objektiv kamery snímá cílovou oblast na soustavu snímačů digitální kamery. Kamera je schopna zachytit každý světelný impuls v samostatných snímcích.
Jakmile je zaznamenána sekvence dvou světelných pulzů, jsou snímky rozděleny na malé dílčí úseky nazývané dotazovací oblasti (IA). Dotazovací oblasti z každého snímku, I1 a I2, jsou navzájem křížově korelovány, pixel po pixelu.
Korelace vytváří vrchol signálu, který identifikuje společný posun částic, DX. Přesného měření posunu – a tedy i rychlosti – se dosáhne subpixelovou interpolací.
Mapa vektoru rychlosti v celé cílové oblasti se získá opakováním křížové korelace pro každou dotazovanou oblast na dvou snímcích obrazu zachycených kamerou.

Snímky PIV jsou vizuální, stačí sledovat výsev
Záznam obou světelných pulzů ve stejném snímku pro sledování pohybu částic poskytuje jasný vizuální vjem struktury proudění. V proudění vzduchu jsou částicemi výsevu obvykle kapky oleje o velikosti 1 µm až 5 µm.
U vodních aplikací jsou typicky nasazovány polystyrenové, polyamidové nebo duté skleněné kuličky o velikosti 5 µm až 100 µm. Lze použít jakoukoli částici, která uspokojivě sleduje proudění a rozptyluje dostatek světla, aby ji kamera mohla zachytit.
Počet částic v toku má určitý význam pro získání dobrého signálního píku v křížové korelaci. Obecně platí, že v každé oblasti dotazování by mělo být zobrazeno 10 až 25 částic.

Snímky částic s dvojitým pulsem.
Když je známa velikost dotazovací oblasti, zvětšení zobrazení a tloušťka světelného listu, lze definovat měřený objem.
Prostorové rozlišení a dynamický rozsah
Při nastavování měření PIV je třeba vyvážit délku strany šetřené oblasti, dIA, a zvětšení obrazu, s’/s, s velikostí rozlišovaných struktur proudění. Jedním ze způsobů, jak to vyjádřit, je požadavek, aby gradient rychlosti byl v šetřené oblasti malý:
Nejvyšší měřitelná rychlost je omezena částicemi, které se během času Dt dostanou dále, než je velikost dotazovací oblasti. Výsledkem je ztráta korelace mezi dvěma snímky obrazu, a tedy ztráta informace o rychlosti. Platí pravidlo:

Třetí složka rychlosti
V běžných systémech PIV je třetí složka rychlosti „neviditelná“ kvůli geometrii snímání. Tuto třetí složku rychlosti lze odvodit pomocí dvou kamer ve stereoskopickém uspořádání.
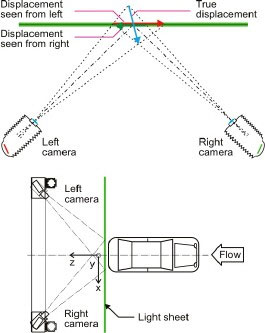
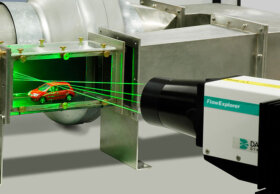
Experimentální uspořádání pro stereoskopické měření PIV proudění za modelem automobilu.